Distributed Formation Control of Quadrotors with Collision Avoidance: Simulation Kaveh Fathian 0:23 6 years ago 516 Далее Скачать
Quadrotor Formation Control with Collision Avoidance: Simulation in Unreal Engine 4 AirSim Kaveh Fathian 1:48 6 years ago 2 486 Далее Скачать
Distributed Formation Control of Unicycles with Collision Avoidance: Simulation Kaveh Fathian 0:23 6 years ago 633 Далее Скачать
Robust 3D Distributed Formation Control with Collision Avoidance and Application to MAVs Kaveh Fathian 2:57 6 years ago 1 277 Далее Скачать
Distributed Formation Control of Cars with Collision Avoidance: Simulation Kaveh Fathian 0:23 6 years ago 571 Далее Скачать
Distributed formation control with obstacle avoidance Autonomous Multi-Robots Lab Delft 1:19 8 years ago 6 767 Далее Скачать
DRL based Distributed Formation Control Scheme with Stream-based Collision Avoidance 邱信友 1:56 3 years ago 60 Далее Скачать
Robust 3D Distributed Formation Control with Application to Quadrotor Formations Kaveh Fathian 2:14 6 years ago 205 Далее Скачать
Robust 3D Distributed Formation Control with Application to Quadrotors Kaveh Fathian 0:46 6 years ago 159 Далее Скачать
Safety-Aware Perception for Autonomous Collision Avoidance in Dynamic Environments Dynamic Robotics and Control Laboratory 3:04 9 months ago 230 Далее Скачать
Collision Avoidance of Dynamic Obstacles - Planar Quadrotor Model Jacob Holmes 0:15 1 year ago 38 Далее Скачать
Quad Formation Control-Full State Feedback Robust Intelligent Sensing and Control Lab-UC 0:06 1 year ago 203 Далее Скачать
Distributed Formation Tracking of Quadrotors:Algorithm and Experiment 王子轩 0:32 5 years ago 48 Далее Скачать
Collision avoidance for quadrotors transporting a payload Flight Dynamics & Control Lab at George Washington University 0:34 10 years ago 286 Далее Скачать
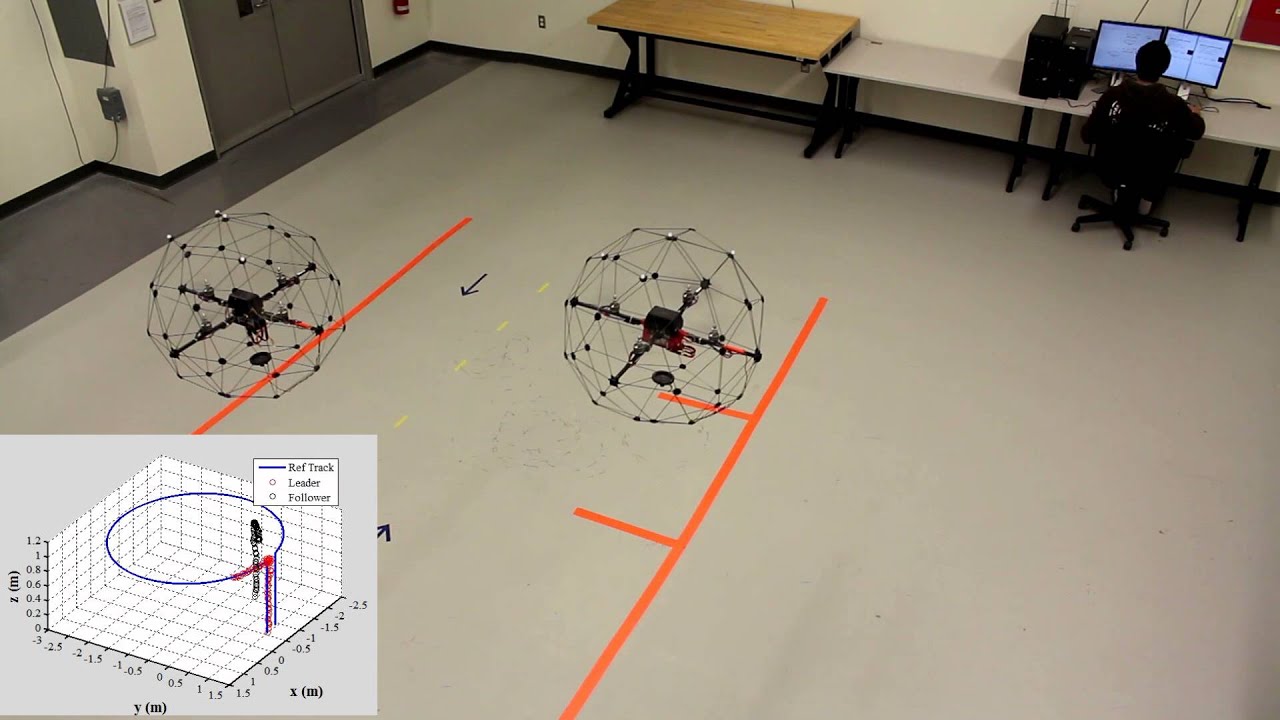
Distributed Leader Follower Formation Control of Multiple UAVs: Case 1 NAV Laboratory, Concordia University, Canada 1:54 8 years ago 284 Далее Скачать
A Graph-Based Collision-Free Distributed Formation Control Strategy Riccardo Falconi 0:52 11 years ago 179 Далее Скачать
Formation control of quadrotors with intelligent disturbance observer-based control mimo gate 0:26 5 years ago 86 Далее Скачать